Robot Localization
Mobile robot localization is the problem of estimating the robots coordinates in an external reference frame from sensor data, relative to a given map of the environment.
The robot’s momentary estimate (belief) is represented by a probability density function over the space of all locations. A uniform distribution as prior represents maximal uncertainty.
Localization can be seen as a problem of coordinate transformation. Maps are described in the global coordinate system, independent of the robot’s pose. Localization is the process of establishing correspondence between the map coordinate system and the robot’s local coordinate system.
Pose often cannot be sensed directly, and has to be inferred from data. A single sensor measurement is usually insufficient, and integrating data over time is required to determine the pose.
Taxonomy
Local vs Global localization
- position tracking
- initial robot pose is known. Localization is achieved by accommodating the noise in robot motion. The problem is local, since the uncertainty is local and confined to the region near the robot’s true pose.
- global localization
- initial robot pose is unknown. Robot is initially placed somewhere in its environment, but it lacks knowledge of where it is.
- kidnapped robot problem
- During operation, the robot can get kidnapped and teleported to some other location. The robot might believe it knows where it is, while it does not.
Static vs Dynamic Environment
- static environment
- only variable quantity is the robot’s pose. Other objects remain at the same location forever.
- dynamic environment
- there exists objects whose location or configuration may change over time.
Passive vs Active Approaches
- passive localization
- localization module only observes the robot operating: the robot is controlled via other means.
- active localization
- control the robot as to minimize the localization error or costs arising from moving a poorly localized robot into a hazardous place.
Summary
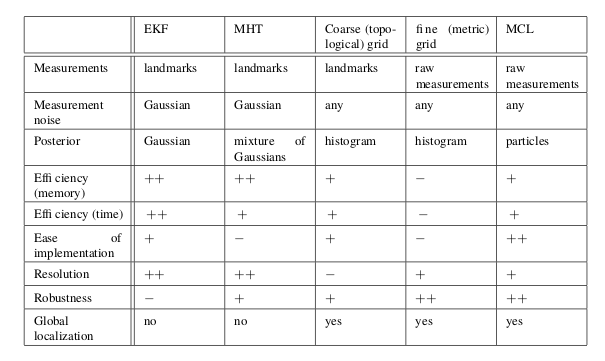
Figure 1: Comparisons between different Markov localization techniques