Robot Kinematics
Kinematics is the calculus describing the effect of control actions on the configuration of the robot. The configuration of a rigid mobile robot is commonly described by 6 variables relative to an external coordinate frame:
- three Cartesian coordinates
- three Euler angles (roll, pitch, yaw)
The robot’s pose comprises its two-dimensional planar coordinates relative to an external coordinate frame, along with its angular orientation:
\begin{equation} \left(\begin{array}{l}{x} \ {y} \ {\theta}\end{array}\right) \end{equation}
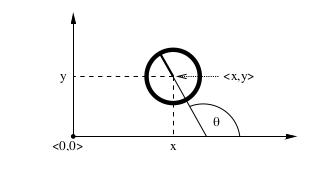
Figure 1: Robot pose
The motion model plays the role of the state transition model in mobile robotics. This model is the conditional density:
\begin{equation} p(x_t | u_t, x_{t-1}) \end{equation}
where \(x_t\) and \(x_{t-1}\) are both robot poses, and \(u_t\) is the motion command. In implementations, \(u_t\) is sometimes provided by a robot’s odometry.
Odometry models are generally more accurate than velocity models, because most commercial robots do not execute velocity commands with the level of accuracy that can be obtained by measuring the revolution of the robot’s wheels. The downside is that odometry is obtained after-the-fact, meaning it cannot be used for motion planning. Hence, odometry models are used for state estimation, while velocity models for motion planning.