Google Cartographer
System Overview
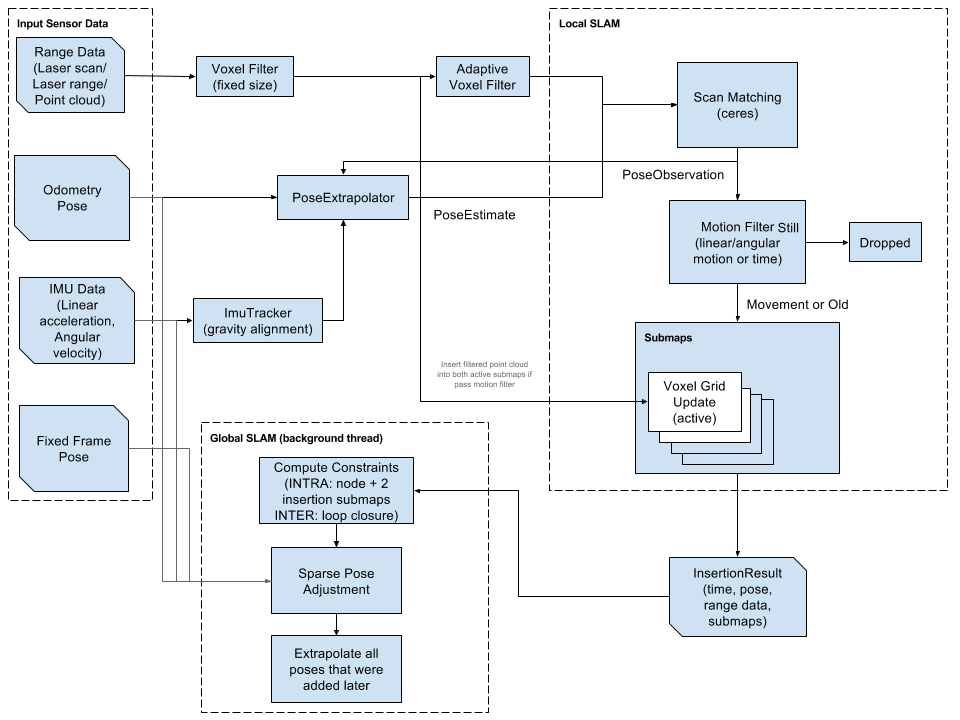
Google Cartographer provides a real-time solution for indoor mapping in the form of a sensor-equipped backpack that generates 2D grid maps with a \(r = 5cm\) resolution (Hess et al., n.d.). It is built to scale to large maps, where previous approaches face issues. For example, particle filter SLAM (Simultaneous Localization and Mapping (SLAM)) approaches become resource intensive as maps become large, since each particle filter must maintain a representation of the full system state in each particle.
Laser scans are inserted into a submap at the best estimated position, which is assumed to be sufficiently accurate for short periods of time. Scan matching happens against a recent submap, so it only depends on recent scans, and the error of pose estimates in the world accumulates.
To cope with this accumulation of error, pose optimization is run regularly. When a submap is finished (i.e. no new scans are added in), it takes part in scan matching for loop closure. All finish submaps and scans are automatically considered for loop closure. If they are close enough based on current pose estimates, a scan matcher tries to find the scan in the submap, and if a good match is found within the currently estimated pose, it is added as a loop closing constraint to the optimization problem.
Bibliography
Hess, Wolfgang, Damon Kohler, Holger Rapp, and Daniel Andor. n.d. “Real-Time Loop Closure in 2D LIDAR SLAM.” In 2016 IEEE International Conference on Robotics and Automation (ICRA), 1271–78.