Byron Boots - Perspectives on Machine Learning and Robotics
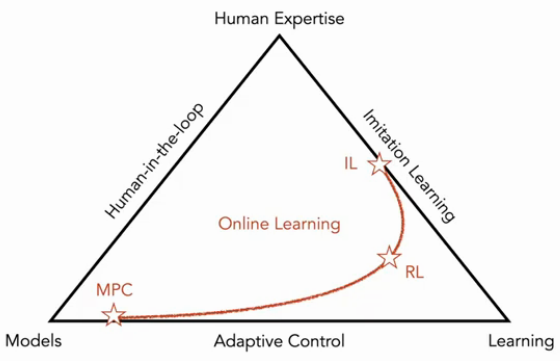
Robotics can be approached from 3 different perspectives.
Machine Learning works because of structure
- In function/policy class
- In objective function
- In datasets
- In optimization
And robotics also has a lot of structure. How do we make choices for our ML algorithms to exploit this structure?
How should robots learn?
Empirical Risk Minimization is too strong: data is not i.i.d, not batched, not in the model class. Solution: use online learning, that makes minimal assumptions.
Online learning has simple derivations, insights from optimization, and may suggest better algorithms.
Model Predictive Control is an effective approach to handling challenging dynamic environments with simple models, because it allows for local optimization of simple policies.
Reinforcement Learning can learn complex policies, and is often state-of-the-art in simulated environments and games. However, the algorithms are data-hungry, and the objective function is non-convex and difficult to optimize.
Imitation Learning provides a general way to accelerate policy learning, by leveraging models/simulators and experts. We can leverage surrogate objective functions that are easier to optimize.